The goal of Duke Electric Vehicle Club is to develop a battery powered vehicle to compete in the Shell-Eco Marathon. This year, as the club was revived, the team has not just been modifying an existing vehcile, but creating it from scratch. I have been tasked with creating an electronic version of a differential, allowing the back wheels to rotate at different speeds to reflect different turning radii.
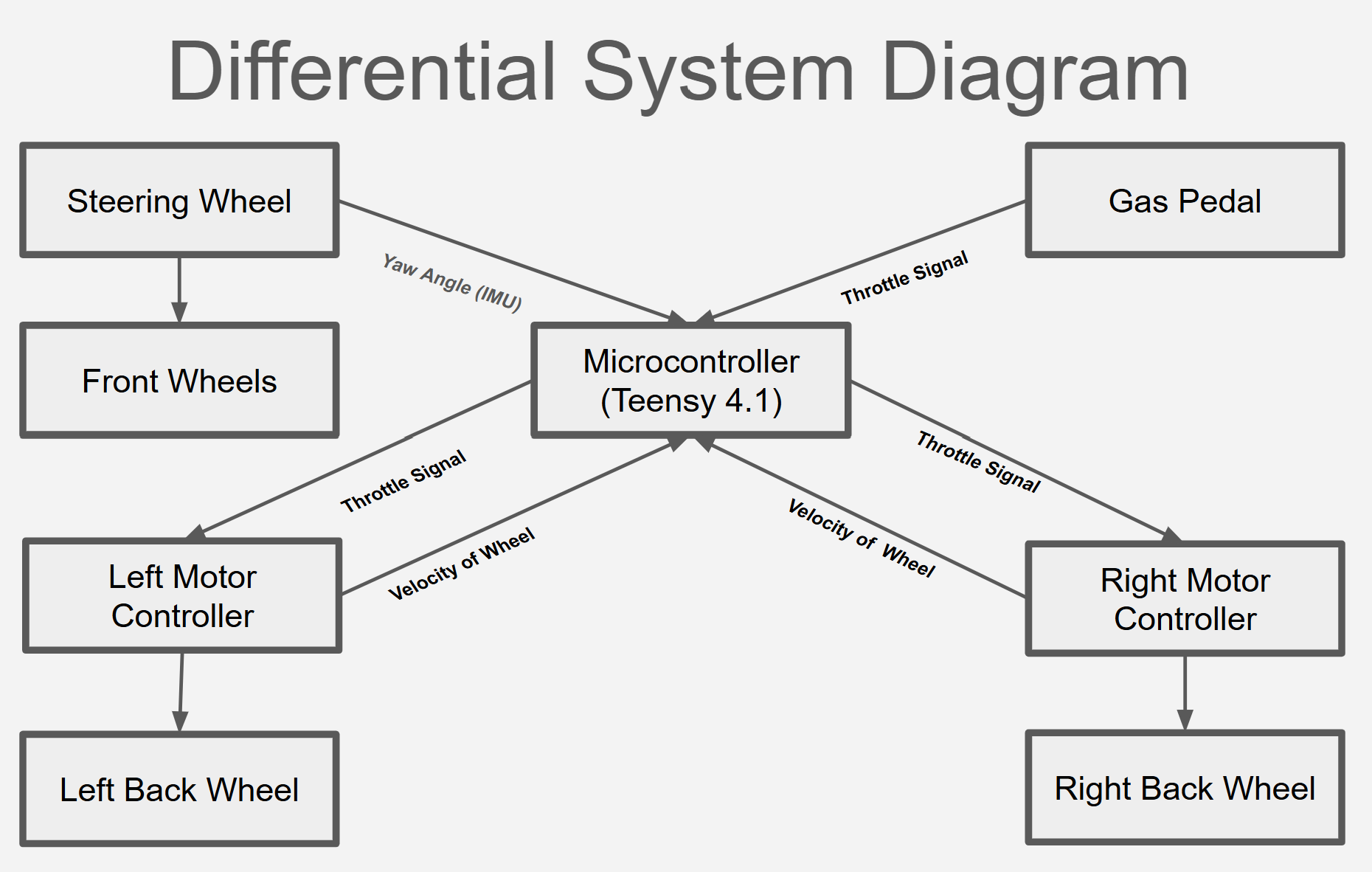
I am responsible for gathering and processing data from the steering wheel, gas pedal, and back wheels to adjust the speeds of the back wheels. The steering wheel angle is processed in a Kalman filter using measurements from a gyroscope and accelerometer. The speed of the back wheels is gathered using rotary encoders. Using decentralized processing, this system uses various serial and analog communication to effectively control the speed of the back wheels, increasing or decreasing them as needed.
Skills: Control Systems, Sensor Integration, Systems Engineering, Kalman Filtering, SPI, UART, C++, Mathmatical Analysis, Circuit Design